LPG Gas Leakage Detector using MQ2 sensor and controller using SG90 Servo and Arduino
The working of the project is quite intuitive. When the Gas Leak Sensor, MQ2 sensor detects any gas leakage, it immediately changes the position of the servo motor; this is to indicate that the valve is being closed to avoid any further leakage. Along with this, the user has to be notified, so an alarm starts ringing. This is using the buzzer. And to indicate with light, a red LED is used to indicate that there is a leak.


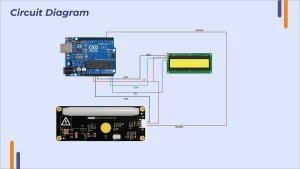
The circuit connections are as shown in the circuit diagram above. Connect the 5V pin of Arduino to VCC pin of MQ2 sensor and also to red wire of Servo. Connect GND pin of Arduino to servo black wire, GND pin of MQ2 sensor, Negative lead of LED (through a current limiting resistor) and to negative lead of buzzer. Connect positive lead of buzzer to pin 12 of Arduino. Connect the positive lead of LED to pin 11 of Arduino. Connect the control pin of Servo, Orange wire to pin 8 of Arduino. And finally, connect pin A0 of Arduino to A0 of MQ2 sensor.